02 : Firefly Bots
The Firefly Robot project originated from Dr. Derrick Yeo's work at the University of Maryland. Rishad Hasan and I joined the project through ROB 203: Robot Mechanism at the University of Michigan, Fall 2024. We presented the project idea at 2024 UM Robotics Undergraduate Symposium and are still working on it. So far, we have built several firefly-bot prototypes and implemented the synchronization algorithm. We are now redesigning the PCB for scalability and preparing for a public exhibition of the firefly wall.
Have you ever seen fireflies twinkling at night? How did you feel?
Introduction
The very nature of this project combines themes in biology, engineering, and art. Swarms of insects, like fireflies are naturally evolved multi-agent systems that coordinate their behaviors in ways that are both functionally significant and visually interesting. Inspired by the rhythmic flashing of fireflies, we are building a swarm of analog firefly robots to mimic their self-synchronization behavior by developing customized digital communication protocols. We plan to study their potential to invoke positive emotions in a viewer and improve humans’ emotional states through our interactive installation.
Background: Bio-Inspired Synchronization
Naturally evolved multi-agent systems - like flocks of birds, schools of fish, and swarms of insects – coordinate their behaviors that are both functionally significant and visually interesting. Inspired by the rhythmic flashing of fireflies, we are building a swarm of analog firefly robots to mimic their self-synchronization behavior and study their potential to invoke positive emotions in a viewer and improve humans' emotional states through interactive art displays and installations.
Prior research in the field indicates that breathing lights have a calming effect on emotional states; We aim to extend this paradigm beyond observation and invite interaction. This poster presents initial progress towards building an interactive wall of self-synchronizing fireflies that also respond to the passage of people walking nearby. In addition to visual cues, we also plan to experiment with generating sounds that represent the state of the synchronization event, initially discordant tones that eventually harmonize along with the fireflies as they self-synchronize. creating a soothing experience for people who interact with the demonstration.
Digitized Synchronization
Firefly Behavior
Our work depends on the digital implementation of synchronization behaviors observed in nature. The table below depicts two bio-inspired self synchronization algorithms and the accompanying electronic processes our robots use to implement them.
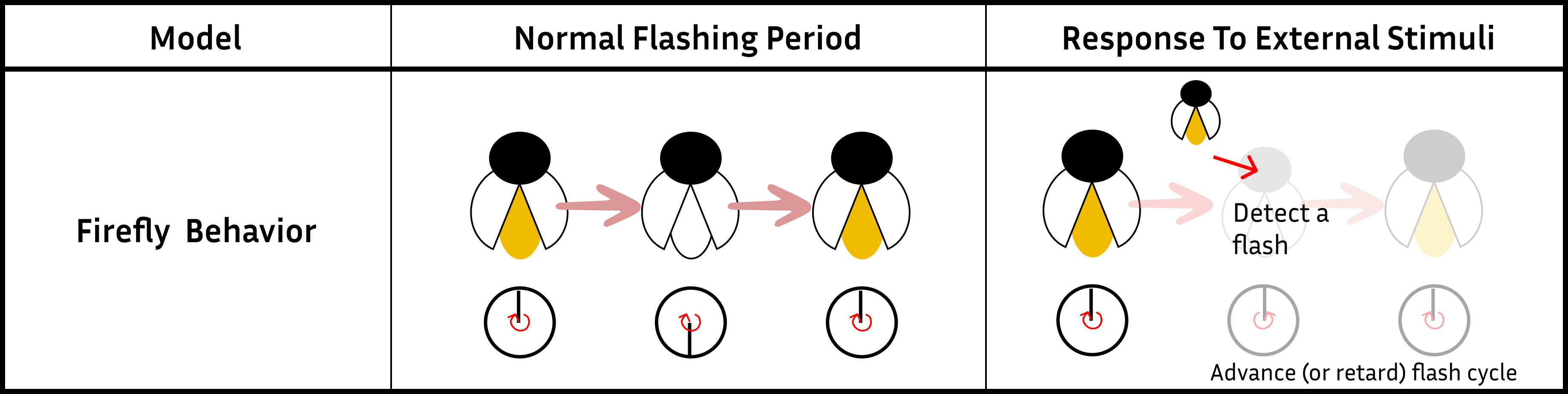
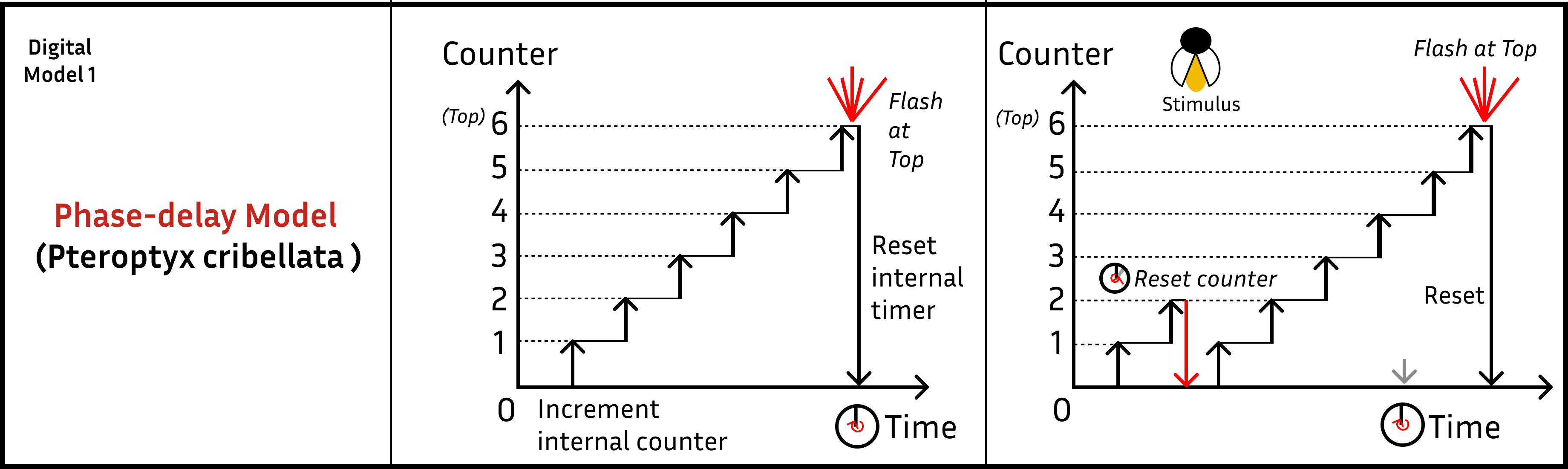
Phase-delay Model
The phase-delay model is one of many proposed by John and Elisabeth Buck based on their observations of how different fireflies behave in their natural habitats. In this model, the firefly resets its internal counter whenever an external stimulus is detected.
Integrate-and-fire Model
Louis Lapicque was a French biologist who introduced the Integrate-and-fire model in 1907, which was later applied to describe neuronal activity in the 1970s. An integrate-and-fire oscillator adds to an internal function until some threshold value is reached when the system "fires" and resets. This model is commonly used to describe similar phenomenon in our brain, where the firing of each neuron is stochastically driven by the excitation of other individual neurons by the same integrate-and-fire model, causing a chain effect that ultimately results in brain activity on the macroscopic scale.
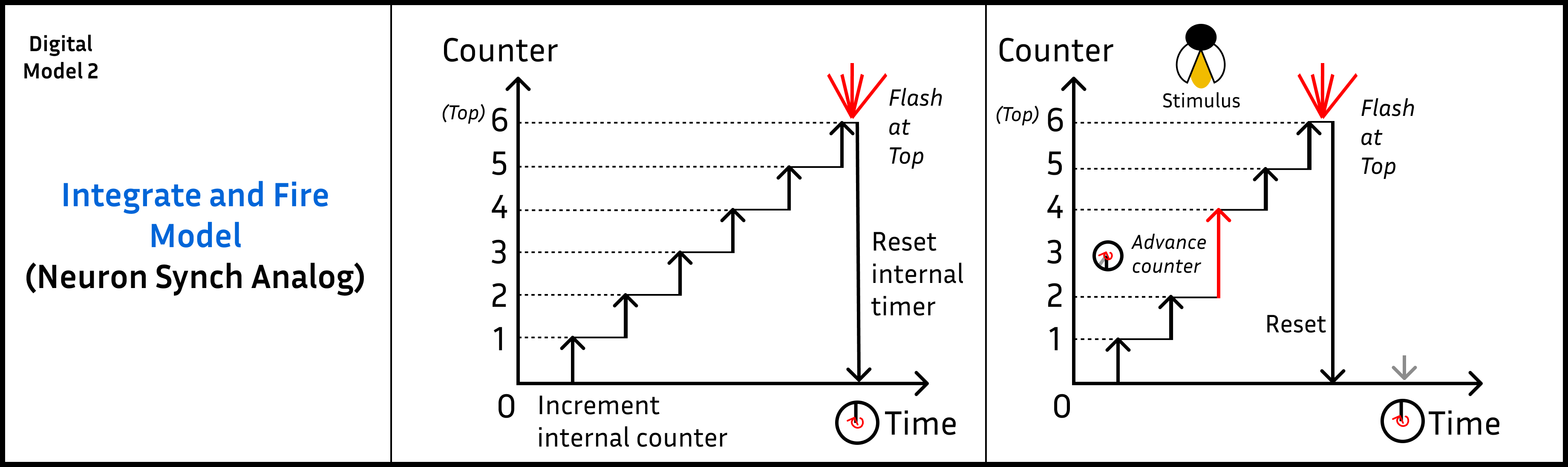
Our robots emulate the natural flashing period of a firefly by constantly advancing an internal counter and using it to time its own flash cycles. When the flash of a nearby firefly is detected, the bots make adjustments to the state of this counter according to the synchronization model implemented.
Firefly-bot Communication
Pulse-width Modulated Synchronization Signal
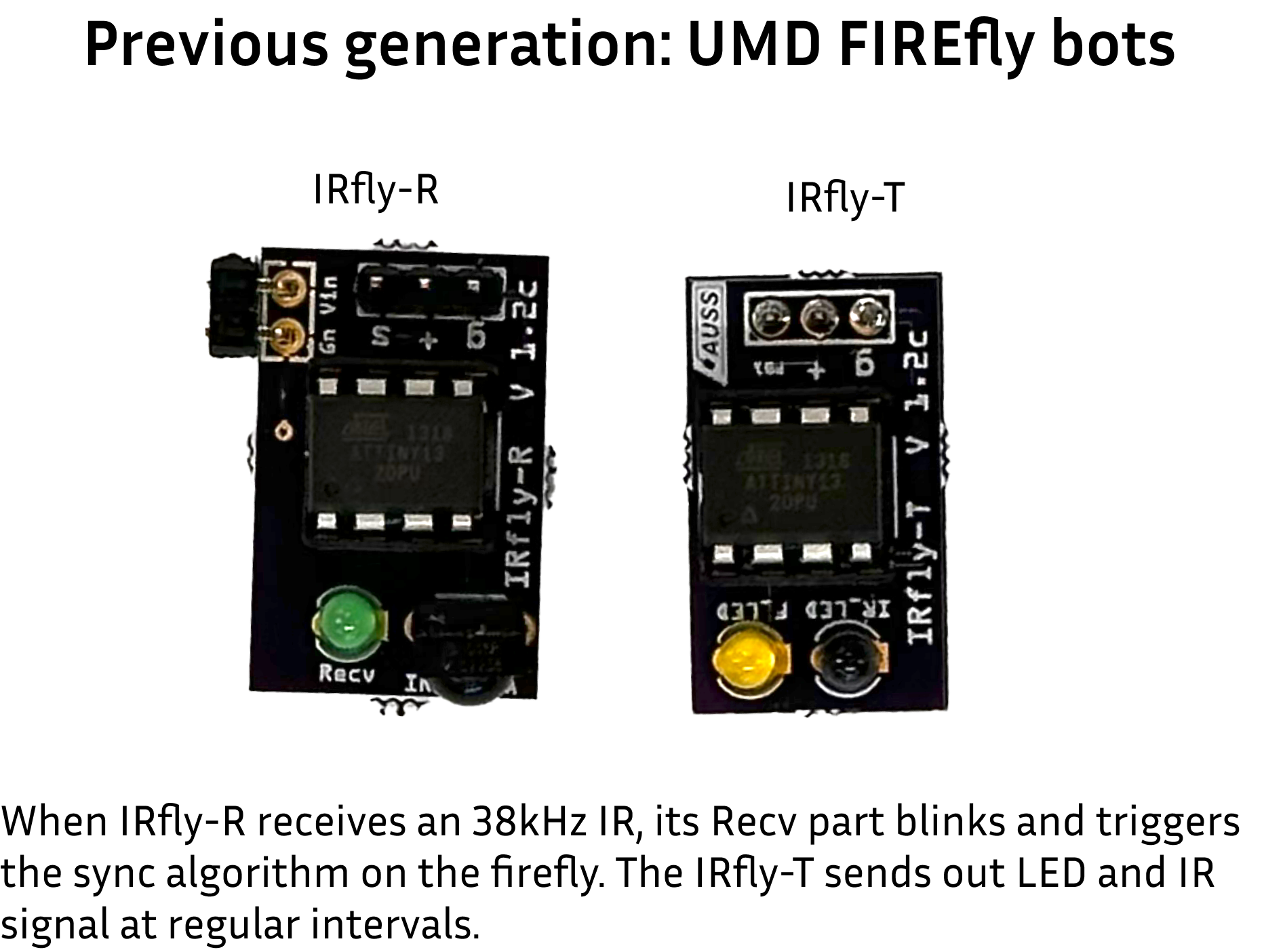
We implemented infrared (IR) based communications between firefly robots instead of the visual cues that actual fireflies use for signaling each other. This allows for more robust and reliable communications that are not sensitive to changing ambient lighting conditions and interfering IR sources like reflections or sunlight. Each firefly bot is equipped with an IR LED for transmissions and an IR receiver tuned to a 38kHz carrier, enabling them to exchange serially encoded binary numbers that can be used for identification and basic instructions.

Proposed Audience Interaction Scheme
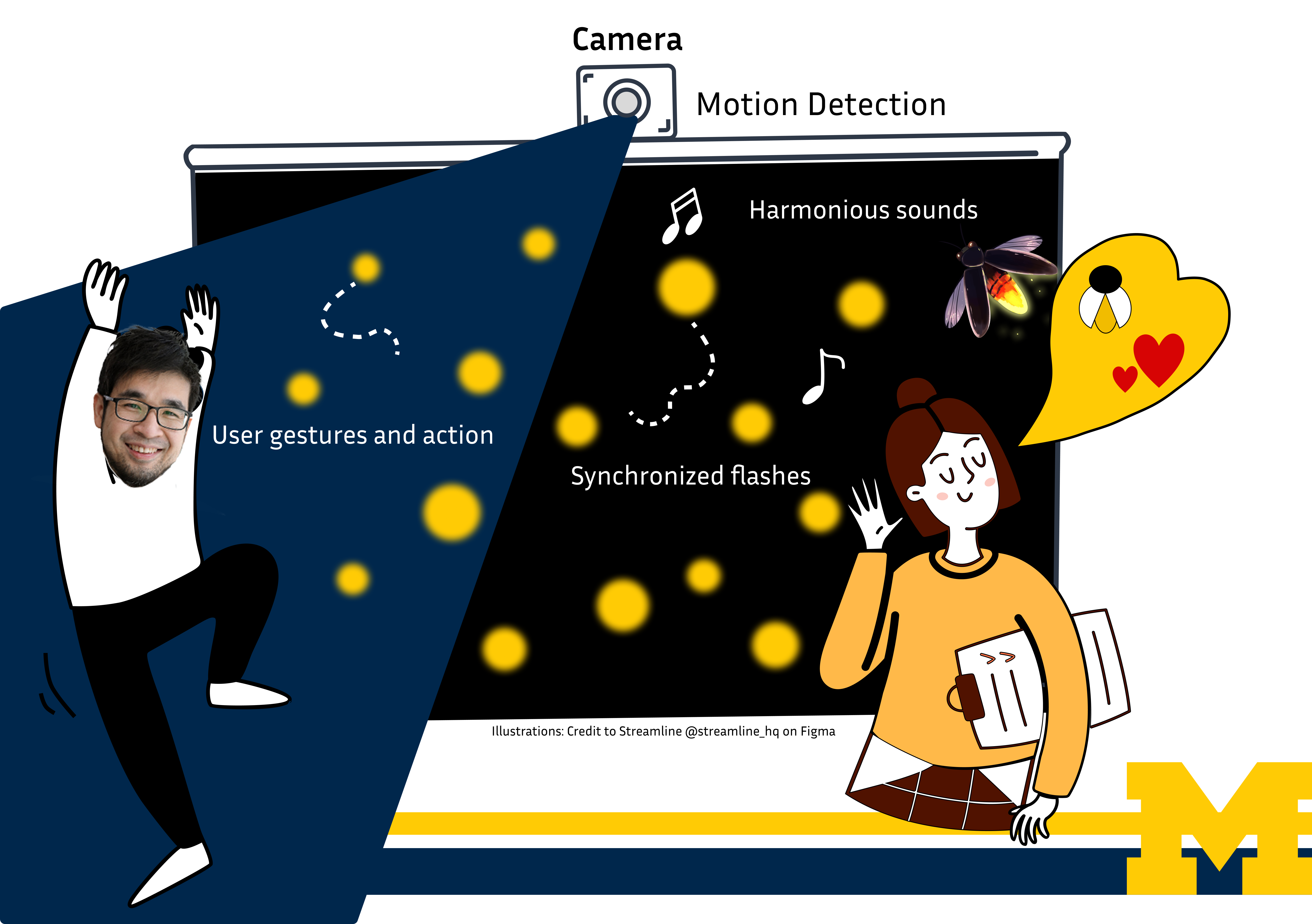
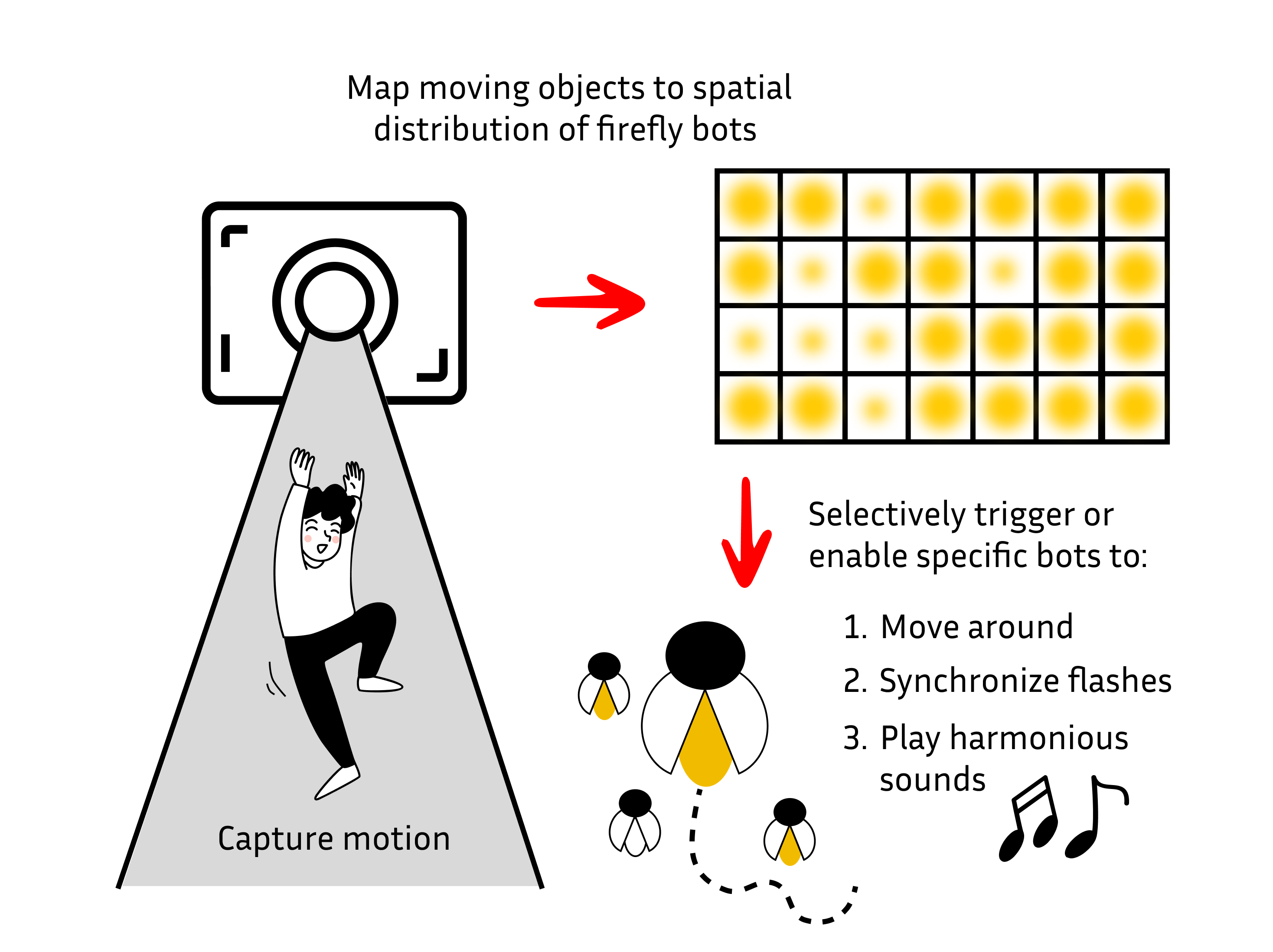
We envision an installation where a swarm of fireflies are mounted on a vertical surface that loosely represents 'pixels' on the display. A camera-based system will detect people approaching the display and allow them to interact with the swarm by affecting the firefly robots through a combination of gesture and proximity cues. The relevant Fireflies might be activated, reset or phase-advanced by these cues and allowing the user to initiate or affect a synchronization event.
Motion detection and installation feedback
Current Progress
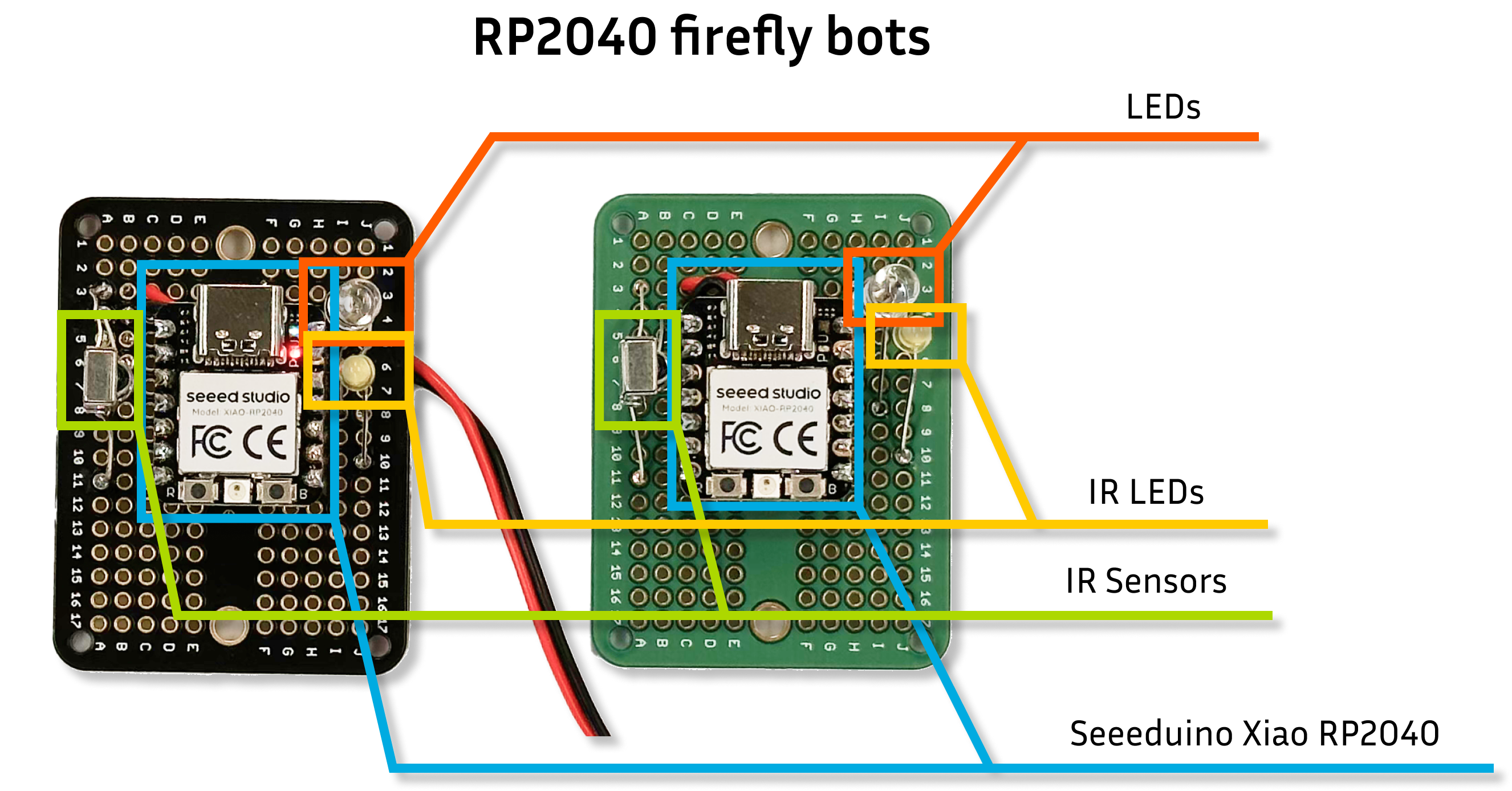
Synchronizing RP2040 firefly bots
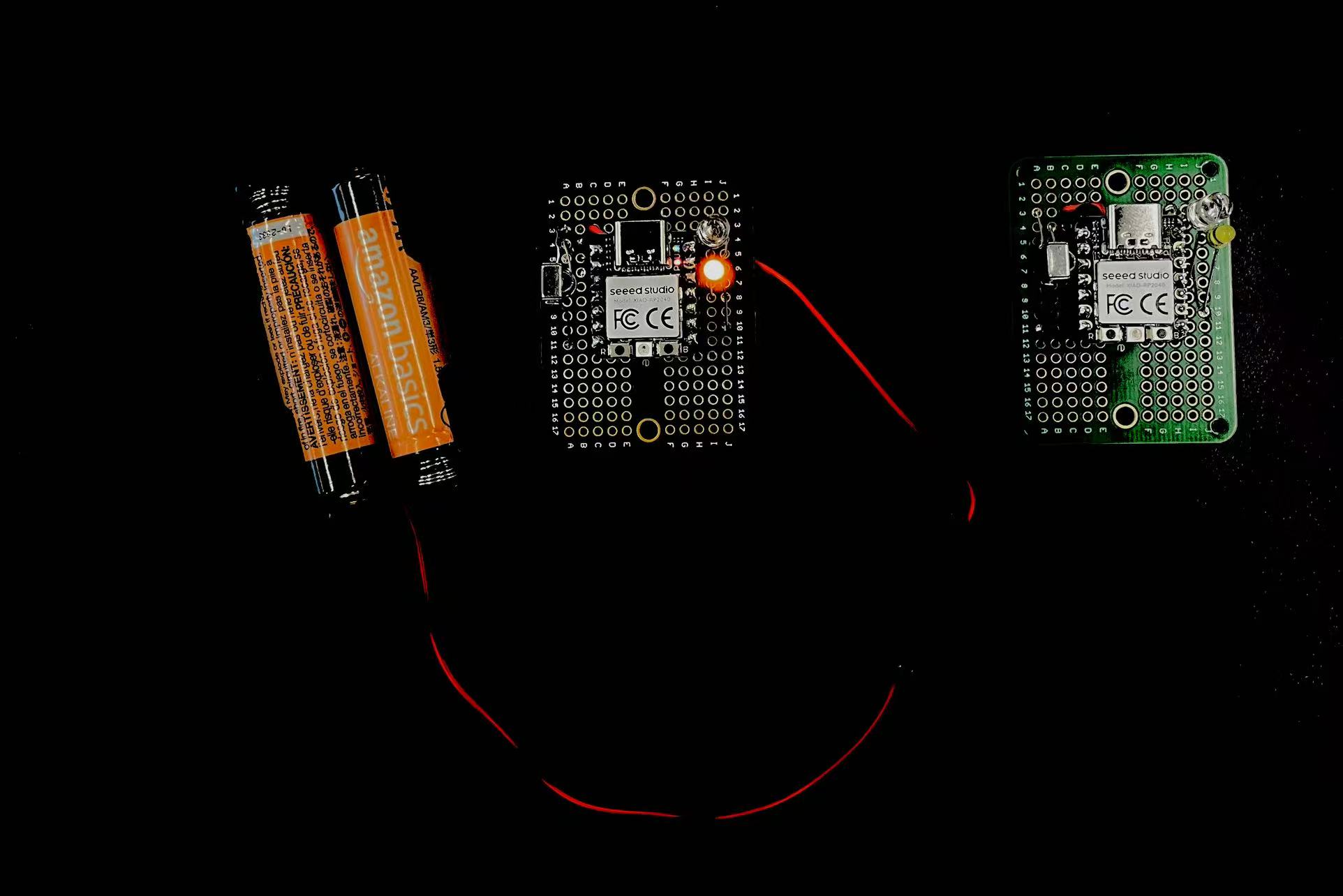
We have developed new firefly bots on RP2040 microcontroller that are backwards-compatible with the previous-generation of UMD FIREfly bots while keeping the IR-communications protocol easily expandable to support interactive elements. The current bots transmit IR-signals and flash visible LEDs at regular intervals, detect IR signals from neighboring units, and implement synchronization algorithms.
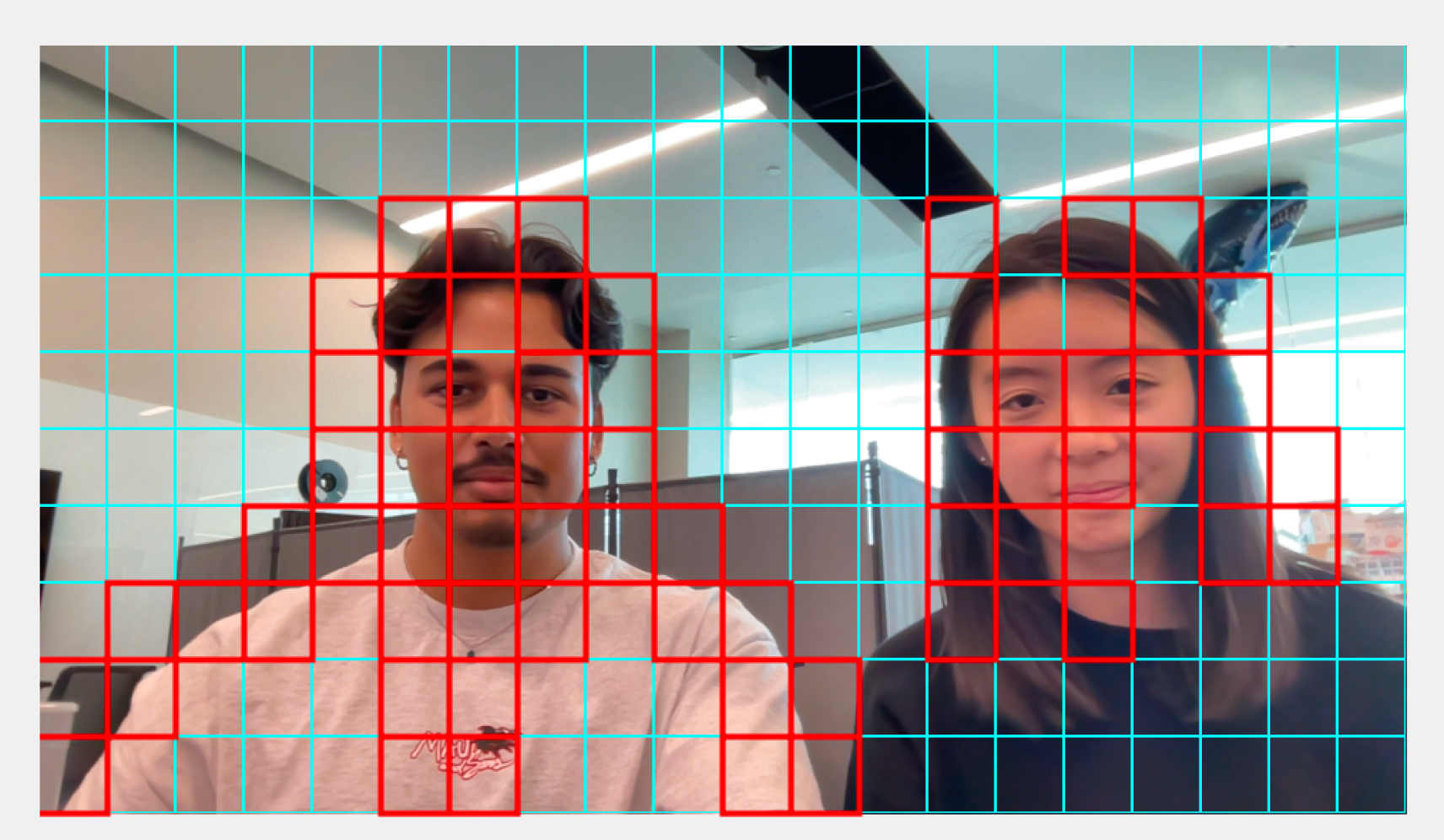
Motion Detection in MATLAB
We have implemented a camera-based interactive algorithm in Matlab that detects and maps motion in the captured image plane to trigger signals for firefly bots in specific zones of the display. This serves as a basis and proof of concept for the unit-based approach we will implement with the fireflies.
Onging Development
Firefly Wall
We are currently designing printed circuit boards (PCBs) based on our prototypes in order to streamline the process of producing the large number of fireflies needed to create our swarm. We plan to mount them on a large vertical surface to create a wall of fireflies. The display will serve both as an art installation and an experimental tool that allows us to survey people who interact with it to assess the emotional impact of interacting with the swarm.
Educational Module
This will allow us to continue the educational mission of the UMD FIREfly robots by developing instructional material around the firefly system and offering them as a kit. A standardized PCB design will enable quick and easy assembly that would be beneficial in a classroom environment, allowing the firefly bots to serve as a hands-on learning tool exploring electronic circuits, software and biological phenomena.
Acknolodgements
We would like to acknowledge the University of Maryland FIRE program that supported an earlier version of this work, Michigan Robotics for supporting our work through ROB 203, Robotics Mechanisms, and UM ArtsEngine for funding our production of PCBs and holding exhibition.